技术路线对比 | 特斯拉FSD为代表的端到端模型VS车路云一体体系的自动驾驶

随着马斯克访华,特斯拉FSD入华“几无悬念”,只等一个具体时间表。这一消息对国内自动驾驶行业,无疑是一个“重磅炸弹”,是会把国内已经卷到白热化的自动驾驶格局“炸”到更乱,还是作为推进剂,“炸”得国内行业参与者齐头并进?以特斯拉为代表的基于视觉的端到端自动驾驶路线,和以“车路云一体化”为代表的自动驾驶中国方案,到底哪个更能成功、更能演进到自动驾驶终局?目前行业有以下一些事实和观点。
一.自动驾驶行业当前的技术路线对比
1.“感知、定位、预测、决策、控制”的模块化算法体系(控制自动化领域经典模型)VS纯视觉的端到端方案(FSD V12 为代表)
这一层面的对比是技术路线演进趋势下的新旧对比。“模块化”算法是自动化控制领域经典的算法闭环模式,早期自动驾驶的从业者有一大批来自机器人领域。由该模式的算法系统目前演进到了端到端的模型方案。
当前端到端技术路线的主要方案,其主要的特点:
一是各个算法模块可以通过整体优化达到全局最优。另外一个特点是交互式的多种corner case的场景作为局部规划的输入,提升了处理复杂场景的能力,其中最优秀的代表是特斯拉的FSD,且特斯拉是更激进的仅依赖视觉摄像头为唯一传感器。
该路线技术层面的突出特点有二:
一是端到端设计,将 “感知、定位、预测、决策、控制”等多个算法模块,全部采用统一的神经网络的深度学习模型方法进行训练,将前述的功能特性交由神经网络进行学习获得,而从软件工程模块上消除。这样做,极大地减小了智能驾驶系统的代码量、系统耦合多、开发工程师需求;
二是数据驱动,这种技术路线依靠大量的实时数据采集,回传至云端进行学习,进行模型迭代。可以说未来系统架构和模型设计的IP价值将降低,自动驾驶的表现极大程度上依赖数据。
特斯拉在 2021 年 AI Day上公布的 FSD 系统架构
图片来自特斯拉
2014年特斯拉开始布局自研自动驾驶软硬件,最初的技术路线也是“模块化”的多头多任务算法系统路线。2023年8月,特斯拉的FSD V12版本全面转向端到端的自动驾驶技术方案,效果惊艳,在北美OTA后几个月内几乎“零差评”,很多智驾行业从业者评论“革命性突破”、“感觉像人在开车”。
目前就单车智能的技术路线演进而言,可见的未来,会沿着以神经网络为核心的端到端大模型、LLM(大语言模型)上车的方向去发展,传感器选择方面,由于特斯拉的标杆效应,也将以视觉为主。
2.纯视觉的端到端方案(FSD V12为代表) VS车路云一体的自动驾驶方案
当前还有一种观点,认为以特斯拉为代表的端到端路线会随着技术发展,逐渐成为解决自动驾驶问题的“终极方案”。而我国“车路云一体化”的技术路线,也是为了解决自动驾驶、智能交通问题而给出的“最终方案”。这一层面的对比,是对自动驾驶未来全面落地最有可能采用的技术路线的评判。
我们认为:FSD V12(纯视觉的端到端方案)车路云一体技术可以进行对比,但两者并不冲突。
原因有二:
1.车路云比FSD更接近自动驾驶的终局,两者的目标ODD实际并不同
虽然FSD版本在24年以来被高度评价,但也绝非没有长尾问题。就在不久前,特斯拉在北美出了一起事故:浓雾天气下,车辆没有识别到横向行驶的火车,司机在最后一刻接管,上演惊魂一幕。这种看不到、看不清、看不全、看不准的问题,是基于视觉传感器必然存在的问题,这是以视觉传感器为主的端到端方案的性能天花板。而车路云的方案则从根本上解决这种问题。
当然,在推进进程上看,车路云一体化比FSD的技术路线更艰难。一般科学与工程问题,需要解决的问题越高级,实现的难度也越复杂。以视觉为主的端到端方案,仍然是单车智能。车路云一体的技术方案相比较于单车智能,可以很好地解决上述长尾问题。但是车路云一体化的方案,存在运营与责任主体多、架构跨行业导致更复杂更难统一等很多问题,而FSD的方案,以特斯拉一家整车厂的资源,则可以统一推进。
但是上述困难,在我国行业环境、政策优势的前提下,有望解决,最终推进成功车路云一体化的事业。
2.两者可以协同发展
由于两者ODD本就不同,车路云协同可以作为单车智能的一个有效补强。在解决前述的传感器局限性问题时,由车路云体系下的Peer节点,提供远端的感知信息,从而提供群体智能的感知信息,供单车融合决策;
当前端到端的自动驾驶算法发展,需要大量的数据作为性能的支撑。同样地,车路云一体化的体系建设过程中,数据采集、数据前处理、数据回传、自动化标注以及仿真系统设计等环节,都会在未来技术演进过程中形成协同。
综上,在网联式自动驾驶、数据基础设施建设等方面,车路云一体化与端到端模型的技术路线是可以协同发展的。
二.C-V2X在未来技术路线演进下的应用场景
C-V2X作为车路云一体的核心技术支撑之一,同时也可以是端到端技术路线的一个必要补充。本人有以下一些观点:
端到端模型,FSD是以纯视觉为主,行业内对端到端的训练不仅仅输入视觉,还包括车身运动信息、交通信息类的约束,那么可以探索加入C-V2X作为超视距、来自Peer节点的信息,同样作为训练约束,这是C-V2X与端到端大模型设计与训练的可探索的方向;
以FSD为代表的端到端大模型,依赖的是海量数据,而C-V2X正可以帮助车辆提供更加海量的数据,这是C-V2X对端到端大模型数据闭环方向的价值;
车路云与端到端的技术路线,如前所示,两者旨在解决的问题并非完全一致,在解决长尾问题方面,车路云一体的方案是必要的解决方法,而在多数场景下,端到端的技术路线由于其产业推进速度更快,可能也会得到长足发展,两者应该在相当一段时间内共存并共同演进,随着技术、产业的变化而形成新的格局。
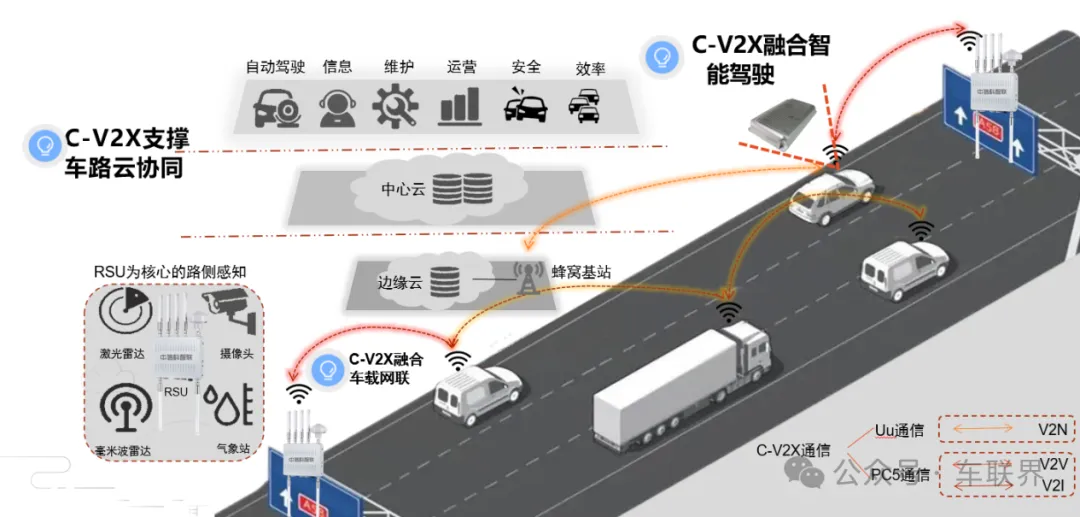
未来基于C-V2X的车路云一体化方案
人类科技需要解决的问题已经越来越复杂。而自动驾驶、智慧交通,既是习近平总书记“把科技强国战略目标变为现实”的号召下的自主自强的战略高地,也是多个行业、多个技术领域交叉协同发展的技术高地。中信科智联以极大的热情投入,也欢迎同行者一起交流,在尚未完全成熟的前沿科技领域,共创成绩。

重庆: 重庆市高新区科学谷数智科创园3幢8-10层
北京: 北京市朝阳区安定路5号院19号城奥大厦13层
邮箱地址: icvmkt@cictci.com
销售电话: 023-65165656(重庆) 010-64286688(北京)
售后电话: 400-666-3620
关注我们的官方媒体:


